您现在的位置是:首页 > 科技前沿
智能机器人论坛 | CNCC2020(济南)技术论坛
智慧创新站
2025-03-02【科技前沿】156人已围观
简介CNCC(济南)智能机器人论坛将于10月22日13:30-15:40在线举行。本论坛邀请了智能机器人领域的专业人才,聚焦研讨机器人感知理论和方法、机器人学习的理论和方法、地图构建与定位导航,以及人机自然交互与和谐共融等领域的发展。智能机器人是系统软件、机器学习和人机交互等多学科交叉的新兴领域,与产业...
CNCC(济南)智能机器人论坛将于10月22日13:30-15:40在线举行。本论坛邀请了智能机器人领域的专业人才,聚焦研讨机器人感知理论和方法、机器人学习的理论和方法、地图构建与定位导航,以及人机自然交互与和谐共融等领域的发展。
智能机器人是系统软件、机器学习和人机交互等多学科交叉的新兴领域,与产业界密切相关,已广泛应用于教育、医疗、旅游、银行等行业,研究领域主要涉及机器人操作系统和软件、感知理论和方法、机器人学习的理论和方法、地图构建与定位导航、人机自然交互与和谐共融等。本论坛将组织智能机器人领域的专业人才,聚焦研讨机器人感知理论和方法、机器人学习的理论和方法、地图构建与定位导航,以及人机自然交互与和谐共融等领域的发展。
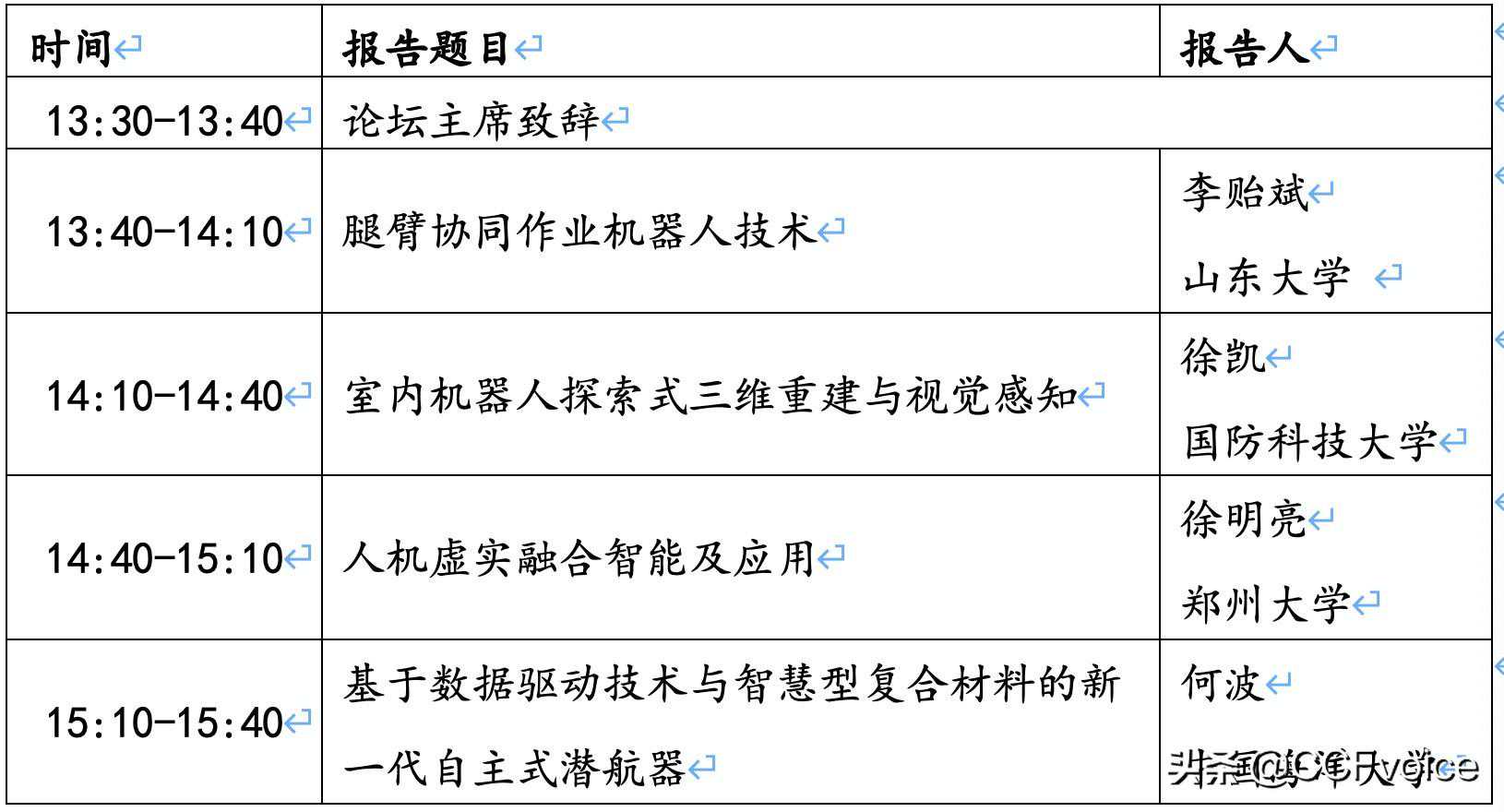
会议流程:
论坛主席:
屠长河,山东大学计算机科学与技术学院教授,博士生导师,山东大学计算机学院常务副院长,山东大学泰山学堂功勋教授,CCF青岛分部副主席。教育部动漫与数字媒体教学指导委员会委员,中国工业与应用数学学会几何设计与计算专委会副主任,中国计算机学会CAD/Graphics专委会常务委员。研究兴趣为计算机图形学、三维视觉、智能机器人等。在SIGGRAPH、Eurographics、TOG、TVCG、CAGD等发表论文多篇,获国家科技进步二等奖1项,教育部和山东省科技进步二等奖多项。主持包括国家自然基金重点项目,863高性能计算机重大应用课题,国家重点专项课题等项目多项。
董军宇,中国海洋大学信息与工程学院副院长、教授,CCF青岛分部主席。教授,博士生导师,现任CCF青岛分部主席,ACM青岛分会主席,中国海洋大学与澳大利亚阿德莱德大学合作设立的海德学院院长,兼任信息科学与工程学院副院长。担任KSIITransactionsonInternetandInformationSystems期刊编委,法国InterdisciplinaryGraduateSchoolfortheBluePlanet(ISBlue)国际学术委员会委员。主要研究方向为计算机视觉、水下视觉及海洋大数据分析。主持承担了科技部国际合作项目1项、国家自然科学基金项目6项,包括重大仪器(自由申请)项目1项、NSFC-山东联合基金1项,此外还主持承担了多个省部级项目。已在多个主流国际期刊及国际学术会议上发表论文200余篇,获得授权国家发明专利6项。
讲者介绍:
李贻斌,工学博士,博士生导师,山东大学控制科学与工程学院教授、副院长。现为国家自然科学基金委员会第十二届专家评审组成员,山东大学控制科学与工程学院机器人研究中心主任、学术带头人,控制科学与工程学院学术和学位分委员会委员,山东大学学术委员会信息学部委员,国务院特殊津贴获得者,国家“863”计划先进工作者,山东省中青年学术骨干,山东省信息化咨询专家,山东省自动化学会副理事长,山东省机器人专业委员会主任。承担和完成“863计划”课题4项,国家自然科学基金课题2项,省部级项目9项,企业委托项目8项,获国家科技进步二等奖1项,省科技进步一等奖1项、三等奖1项,省教学成果一等奖1项,山东省十大科技成果奖1项,国家煤炭工业十大科技成果1项。在国内外学术期刊和国际会议上发表论文140篇,其中EI收录60余篇。现主要从事智能机器人、特种机器人、智能车辆、智能控制和机电一体化等方面的教学和科研工作。
报告题目:腿臂协同作业机器人技术
报告简介:本报告将分别就腿臂协同作业机器人的发展历程、发展趋势、社会需求等方面进行介绍,并重点从移动作业机器人研究现状、四足双臂机器人一体化设计及分析、四足双臂机器人多元系统建模与控制、腿臂协调共融控制方法、复合场景通过性及交互异常检测评估、腿臂协同机器人仿真与物理验证平台等六方面进行讲解。
徐凯,博士,国防科技大学教授。获国家自然科学“优秀青年基金”和湖南省自然科学“杰出青年基金”资助。发表ACMTransactionsonGraphics、CVPR、AAAI等A类论文三十余篇。担任ACMTransactionsonGraphics、ComputerGraphicsForum、ComputersandGraphics和TheVisualComputer等国际期刊的编委。担任CAD/Graphics2017、ICVRV2017和GDC2016等国际国内会议的论文共同主席。担任SIGGRAPH、SIGGRAPHAsia、SGP等顶级国际会议的程序委员。曾获湖南省自然科学一等奖、军队科技进步二等奖、全军优秀博士论文奖、中国工业与应用数学学会“几何设计与计算青年学者奖”、“湖湘青年英才”等奖励。
报告题目:室内机器人探索式三维重建与视觉感知
报告简介:视觉感知是机器人探索、感知和理解未知环境的最重要方式。随着三维传感技术的飞速发展和三维几何数据的快速膨胀,三维图形学正与视觉技术深度交叉、融合,形成基于三维几何的机器人视觉新方向,为机器人对未知环境的三维感知和立体交互提供了重要技术支撑。本次报告围绕机器人室内场景三维几何重建和语义理解,包括:方向场引导的未知场景自主三维扫描与重建,多机器人协同三维扫描与重建,基于机器人主动交互的场三维景分割,以及物体感知引导下的三维场景重建。
徐明亮,郑州大学信息工程学院(计算机与人工智能学院)教授、博士生导师、副院长,河南省大数据智能技术工程研究中心主任,国家优秀青年基金获得者(2018),第十批河南省优秀专家(2019)。学术兼职包括:中央军委科技委某领域首批受聘主题专家,国家自然科学基金委信息学部会评专家,河南省大数据管理局首席专家,嵩山智库副秘书长,中国图象图形学会理事等。担任ICVRV2017、ACMSIGAICHINASymposium2017、ChinaVR2019、CAD/CG2020等国内外重要学术会议程序主席,JournalofVisualLanguagesandComputing、Neurocomputing、FrontiersofComputerScience等重要国际SCI期刊编委。
报告题目:人机虚实融合智能及应用
报告简介:报告内容主要包括虚拟人智能行为建模、人机融合的健康计算、人机行为的协同增强等。从虚拟人技术(可泛化为“具有生命特征”的一切自主虚拟对象),到应用VR/AR与可穿戴设备、人-车共驾、脑控或肌控外骨骼机器人、智能义肢、人机协同作业、健康计算等的深度结合,促成数字孪生、生物系统与机器系统的三体紧密耦合,使人类的直觉、联想、顿悟、经验、创造力、灵巧性等优势与机器的计算、数据存储、机能等优势实现互补,将简单人机一体化技术导向机能和智能的人机融合协同增强,从而衍生出具有显著学科交叉特征的三体融合计算研究方向,有望实现人类梦寐以求的“千里眼、顺风耳、先知先觉、神机妙算、力拔山兮气盖世”的超人类特异功能(即“增强人”),将在军事国防、医疗健康、社会治理等领域产生重大创新机遇。
何波,中国海洋大学信息科学与工程学院教授,电子工程系副主任,水下机器人实验室主任,担任科技部863海洋传感器主题项目的首席专家。何波教授本人及其科研团队长期从事海洋探测传感器以及水下机器人导航、控制方面的科研工作。持863课题2项、军口项目1项、国家自然基金1项以及省部级项目5项。近年发表与本课题相关论文50余篇,其中SCI/EI收录约40余篇。获得相关专利授权6项,软件登记2项。
报告题目:基于数据驱动技术与智慧型复合材料的新一代自主式潜航器
很赞哦!(37)







